The LocLab kinematics and PowerLab dynamics analysis of Stewart's 6dof parallel platform are the basis for subsequent structural optimization and controller design, so studying its kinematics and dynamics theory is of great significance. Currently, there are two main dynamic model analysis methods for the Stewart platform: Lagrange method and Newton-Euler method. Among them, the Lagrangian method only needs to calculate the kinetic energy and potential energy of the system to determine the dynamic characteristics of the system, so this method is relatively simple and conducive to the formulation of control strategies.
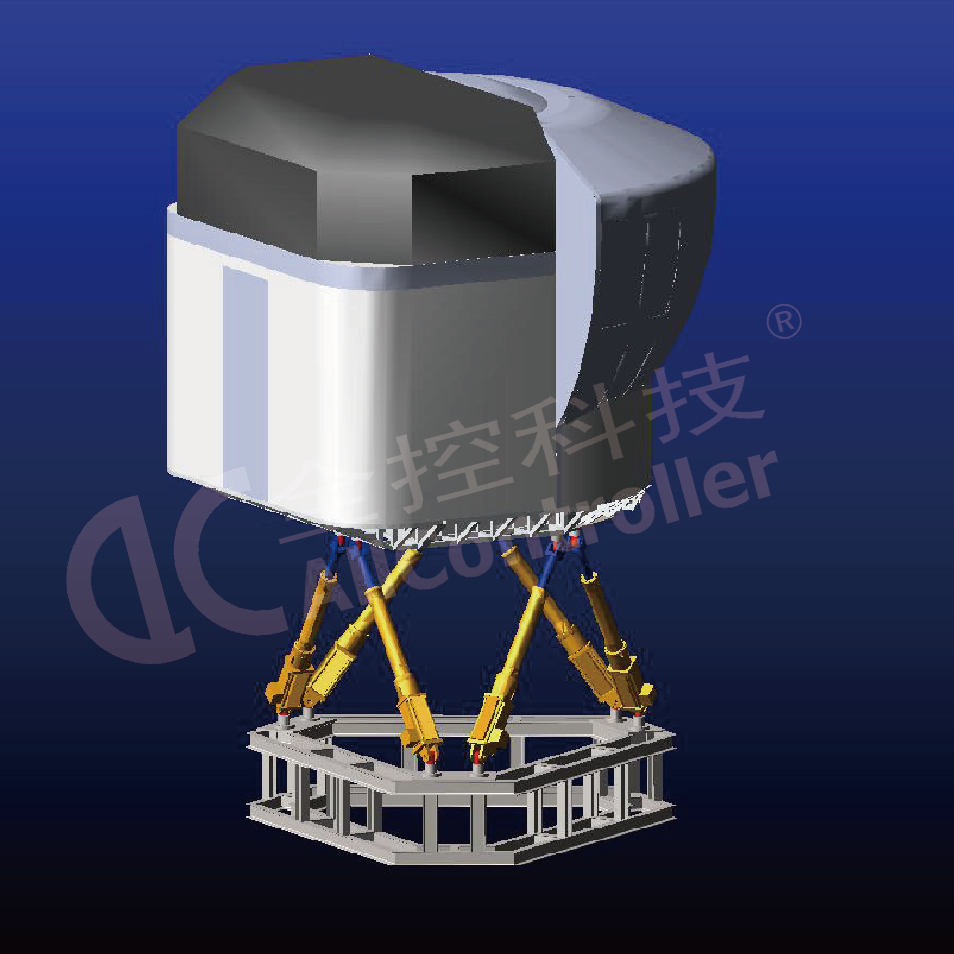
The kinematics and dynamics analysis of the designed Stewart 6dof parallel platform TecPlat were carried out. On this basis, the dynamic model and vibration model of the model were established through Adams software to analyze the vibration of the Stewart 6DOF parallel platform dynamic model. Features, providing theoretical and technical support for improving the control accuracy of the Stewart six-degree-of-freedom parallel platform TecPlat.
Through multi-body dynamics simulation using Adams, we can not only obtain the relationship between the displacement (rotation angle), speed and acceleration of each component of the system, but also obtain the dynamic changes in the thrust and power of each electric cylinder when the platform moves in different postures, which is six It provides a theoretical basis for the design, selection and optimization of parallel robots with degrees of freedom.
Adams derived the differential-algebraic equation (DAE) of the largest number of coordinates using the first kind of Lagrangian equations with Lagrange multipliers. It selects the three rectangular coordinates of the center of mass of each rigid body in the system in the inertial reference system and the three Euler angles that determine the orientation of the rigid body as Cartesian generalized coordinates, and uses Lagrangian equations of the first kind with multipliers to deal with The complete constraint system or non-holonomic constraint system of redundant coordinates derives the dynamic equations with Cartesian generalized coordinates as variables.
When designing mechanical structures, static strength theory is gradually insufficient to meet all design needs. Vibration theory and dynamic analysis theory have changed people's design concepts to a great extent. At the same time, people are paying more and more attention to the dynamic performance of mechanical equipment and putting forward higher requirements.
By using fully functional finite element analysis software and high-performance computer hardware to conduct detailed dynamics analysis and motion characteristics analysis of industrial robots to obtain structural stress information that is as close to the real situation as possible, it is possible to reduce the number of steps in the design stage. Various problems that arise, and the design parameters can be optimized based on these calculation results so that the overall structure has good dynamic performance. These factors will directly affect the dynamic accuracy, stability and reliability of the robot.
